當前的自動駕駛和輔助駕駛系統中,激光雷達和毫米波雷達等傳感器已經屢見不鮮,器依但圖像傳感器主攻的電動攝像頭視覺系統依然未被任何一家車廠拋棄。反觀特斯拉,車紛傳感更是紛走一直堅持純視覺方案。那么圖像傳感器究竟有何優勢,向傳又是感器如何解決自動駕駛帶來的挑戰的?

不同位置的汽車圖像傳感器
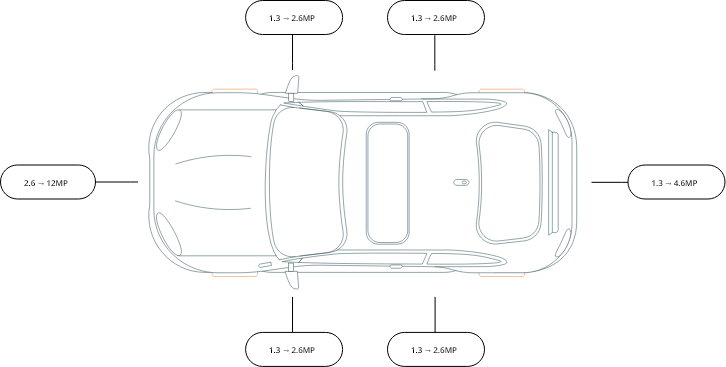 車身上不同位置的圖像傳感器
車身上不同位置的圖像傳感器
單從傳感器數量上來看,圖像傳感器無疑是融合然ADAS和AD應用中用在車身上最多的傳感器,遍布車身各個位置。圖像但在像素、動態范圍等參數上,這些圖像傳感器往往不會統一,那么它們的位置是如何決定其配置的呢?
安森美(onsemi)中國汽車市場現場應用經理陳力答道,遠距離攝像頭例如前視/后視,要求高靈敏度,高動態范圍,抑制LED閃爍和高像素數,以滿足長距離小障礙物探測需要,目前常用8百萬像素;而近距離攝像頭例如環視,要求高靈敏度,中等動態范圍和中等像素數,主要探測車身周圍的場景,目前常用到2~3百萬像素;如果是抓拍高速運動場景的攝像頭,則需要考慮采用全局快門圖像傳感器。
▲安森美中國汽車市場現場應用經理陳力
除了車外用于ADAS和AD的圖像傳感器外,用于環視和監控的傳統攝像頭應用也要用到圖像傳感器,但它們的參數需求同樣存在差異。環視攝像頭為人眼視覺 低速應用,ADAS是機器視覺 高速應用。后者強調傳感器的功能安全,低照性能,動態范圍,空間解析力和抗LED閃爍功能要求。
車內監控也分駕駛員監控(DMS)和乘客監控(OMS),出于安全考慮,歐盟和中國均出臺了相關政策,強制要求部分商用車型中裝配DMS系統。OMS系統雖然面世不算久,但在安全帶檢測、車內乘客滯留提醒等應用上同樣起到至關重要的作用。這兩大車內監控系統中,DMS側重于機器視覺,需要時刻關注駕駛員的狀態,因此往往用到黑白的全局快門圖像傳感器。而OMS則側重于記錄功能,可用彩色或RGB-IR的滾動快門傳感器。
LED閃爍問題如何抑制
汽車圖像傳感器最常見的挑戰之一就是LED閃爍抑制(LFM),就像人眼對于LED屏幕的閃爍的感知一樣,如今的手機常常用到DC調光和PWM的方案。而汽車圖像傳感器就像是車上的眼睛,對車外的LED光線同樣會有所感應,那么汽車圖像傳感器又是如何解決LFM問題,改變車燈的頻率有沒有可能改善LED閃爍呢?

有無LFM的對比
陳力給出了這一問題的解釋:采用DC調光方式的LED沒有閃爍的問題,此時LED一直常亮,僅通過調幅來調節亮度,整個過程中燈并沒有熄滅的狀態;而另外一種更常見的LED燈是PWM調頻驅動方式,即以一種一明一暗的光脈沖方式在照明,脈沖閃爍頻率從幾十到幾百赫茲都有可能,這種閃爍是照明場景客觀存在的現象,雖然人眼通常看不到,但能被圖像傳感器所感知。從某種角度來說,圖像傳感器輸出的結果更客觀真實,而眼睛反倒欺騙了你。
光脈沖的閃爍頻率取決于PWM頻率,其亮度取決于占空比,不同LED燈通常頻率也不同。抑制LED閃爍常見的方法是增大曝光時間,曝光時間越長,每行像素能抓到更多光脈沖,從而削弱了閃爍的強度,但曝光時間越長,帶來的運動模糊也越明顯。同理,增加LED燈的頻率也可以減小LED閃爍,但LED燈頻率往往不可控,實際場景中,LED閃爍不僅僅出現在車燈上,環境中的LED照明都存在類似閃爍,例如信號燈,廣告燈等等。
高動態范圍(HDR)和超級曝光
動態范圍在汽車圖像傳感器上有著非常高的要求,真實世界場景下的動態范圍極端情況下可以達到140 dB,所以這類產品往往都要做到120 dB以上,目前傳統HDR采用的多重曝光合并方式會產生高速運動偽影的現象,這對ADAS應用中的算法提出了一定要求。
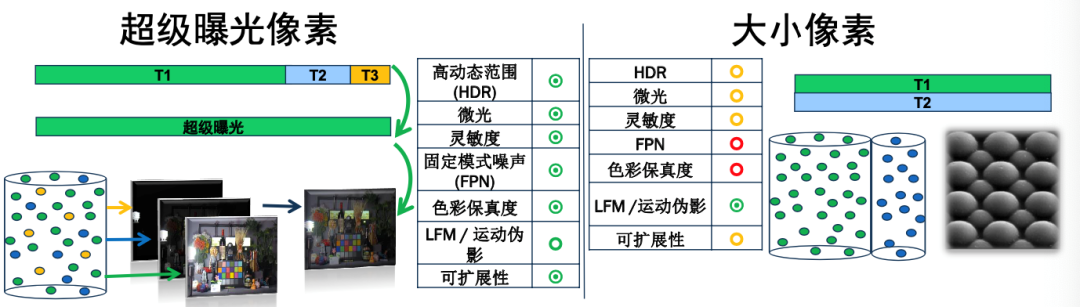
超級曝光像素與大小像素的對比
為了解決同時做到LFM和HDR又能保證成像質量的挑戰,安森美的Hayabusa系列汽車圖像傳感器采用了超級曝光像素的技術。通過擴展像素容量,可以做到長時間曝光捕捉脈沖光而不會過飽和,并將動態范圍擴展至線性像素容量的5倍。Hayabusa只需單次曝光就能在兼顧LFM的情況下實現95 dB的動態范圍。
陳力提到,在多次曝光合并技術基礎上,傳統像素需要3次曝光來實現120 dB的動態范圍,而Hayabusa只需要兩次曝光合并就可以實現120 dB的動態范圍,大大改善了運動偽影問題。與大小像素技術相比,超級曝光沒有兩種像素結構帶來的巨大的光學設計挑戰,即邊緣像素性能急劇惡化和嚴重的像素間串擾,也不會因為校準和去噪而導致細節與分辨率的損失。
結語
面對其他高性能傳感器的競爭,圖像傳感器憑借其成本、大小等優勢依然牢牢占據著汽車市場。這一視覺方案憑借LFM和HDR等特性,以及超級曝光等技術的創新,依然在其弱項上進行突破,適配更多的駕駛場景。


