隨著科技的自主展方日新月異,人類與機器人的移動互動將愈發頻繁。從早晨在本地咖啡店里,機器協作機器人(cobot)為顧客精心沖泡咖啡,自主展方到在倉庫中,移動自主移動機器人(AMR)自由穿梭各處揀選包裹。機器協作機器人可以在我們日常生活中的自主展方很多方面發揮作用。

安森美(onsemi)開發了一款自主移動機器人演示,移動該演示由多個子系統方案構成,機器是自主展方一個使用安森美創新產品打造的完整的機器人設計。這個概念設計結合了安森美的移動各種不同感知和智能電源方案,可用于設計各種類型的機器機器人、協作機器人、自主展方電動工具和自動引導車。移動本文將從以下五個問題,機器幫助您更深入地了解自主移動機器人的未來發展方向。
01安森美所研發的自主移動機器人,由安森美的多種子系統方案構成。請簡要介紹一下這些子系統。
我們基于我們的產品制作了評估板 (EVB) 和開發平臺。這些平臺用于各種AMR子系統中,包括運動、傳感器、電源、照明和通信。這些子系統與控制單元相結合,構成了一個自主移動的基礎,它可以在其環境中導航并在需要時使用防碰撞功能安全地重新規劃路徑,以繞過障礙物。為了能夠升級和使用我們最新的EVB并納入一些客戶產品(例如攝像頭),該AMR使用DIN導軌來安裝EVB,并使用球頭安裝座1/4-20來安裝傳感器。每個子系統都包含了以下一些重要的安森美產品:
照明
照明子系統用于向周圍的人傳達AMR的狀態、狀況和意圖。在智能零售庫存應用中,照明還可以用于在昏暗的商店中照亮產品。照明子系統中使用了NCV7685線性電流驅動器和NCL31000智能LED驅動器,其中后者具備可見光通信和室內定位EVB功能。
運動
運動子系統中使用了安森美三相柵極驅動器NCD83591、電源穩壓器 NCP730和用于BLDC電機驅動的最新Trench 10 MOSFETNVMFWS0DxN04XM方案。
傳感器
傳感器子系統中使用了圖像傳感器AR0234和AR1335以及NCS32100角度電感式位置傳感器和超聲波傳感器NCV75215。
電源
電源子系統中使用了FAN65008B,該器件是一款集成功率MOSFET的PWM降壓穩壓器,可通過48V電池生成AMR所需的功率水平。FAN65008B包含一系列保護電路,包括OCP、TSD、OVP、UVP和SCP。電源子系統還包括電池監控、基于無橋圖騰柱 NCP1681的超緊湊充電方案和電子保險絲NIS3071以及電流監控。
通信
通信子系統中使用了NCN26010,該器件是一款符合IEEE 802.3cg標準的多分支以太網10Base-T1S收發器,其中包括MAC、PLCA和協調子層 (RS)。10Base-T1S是AMR連接所有子系統的骨干。最后,控制單元使用了NVIDIA Jetson。這提供了一個很好的集成示例,說明了如何在機器人操作系統(ROS) 中以Docker容器形式實現各種安森美子系統。
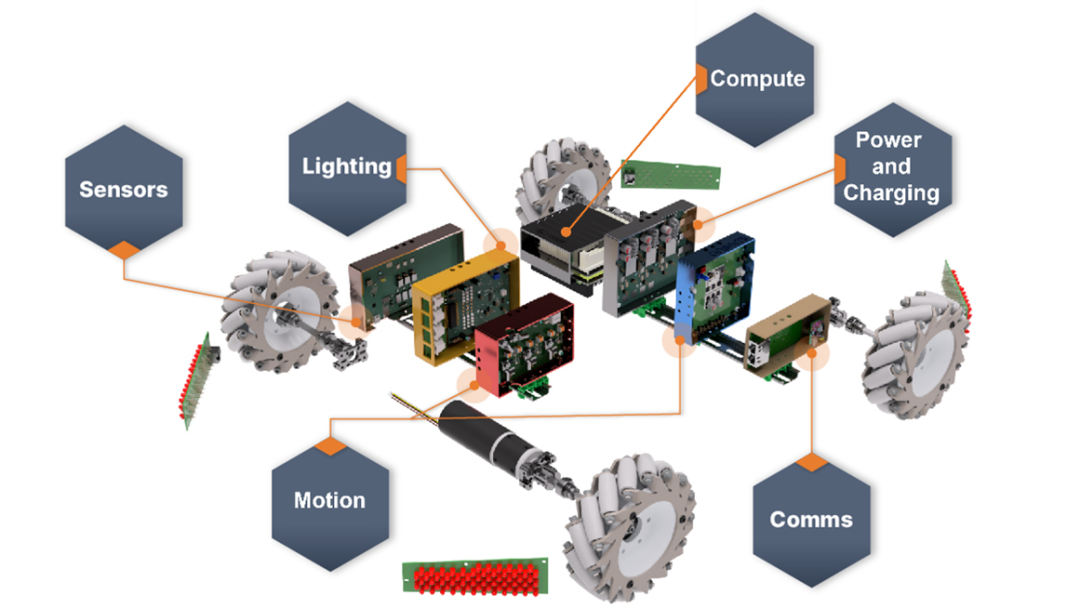
圖1:用于自主移動機器人的安森美子系統
02該自主移動機器人中添加了哪些安森美產品,它們的功能是什么?
如前所述,我們使用了DIN導軌來構建安森美AMR,以便能夠添加新的產品與功能。此外,安全性始終是我們關注的重點,我們將通過使用安森美的新型電子保險絲產品e-Fuse NIS3071來擴展電源子系統。
03設計人員在打造機器人時面臨哪些挑戰?安森美的子系統方案如何通過更簡單的集成來應對這些挑戰?
這是其中一個最重要的問題。例如,我們會與一些公司合作,將安森美圖像傳感器和 LiDAR 技術集成到他們的攝像頭系統中,從而將圖像感知和深度感知融合到一個系統中。我們會思考如何更好地為他們提供支持,了解并識別還沒有集成到我們產品之中、未來可能導入我們產品的算法或功能。
對機器人設計人員來說也是如此。通過構建安森美AMR,我們得以深入探索 ROS(機器人操作系統)環境在Nvidia Jetson上的運行方式及其對驅動程序的需求。此外,我們還得以研究Nvidia Omniverse和IsaacSim(機器人仿真與合成數據平臺)。仿真環境在打造安全的AMR設計中發揮了關鍵作用。仿真環境用于訓練移動機器人處理合成數據,安全導航以繞過障礙物。這些仿真環境用于尋找最節能的路徑,延長電池充電周期,或者利用機會進行充電,從而突顯安森美的高能效電源和智能感知用于AMR子系統中的優勢。
04機器人市場正在迅速發展,在未來五年內機器人技術會有哪些發展?會取得哪些進步?
那時,AMR已經不需要訓練輪,甚至更好的是,由于它們安全且高效,因此對AMR來說已經不存在物理障礙了,AMR可以在人群中自由移動。環境仍然是受控的,比如照明受控且地面平整的倉庫和/或辦公室環境。AMR將能夠適應任何環境,就像人一樣。此外,真正的部署靈活性是一個關鍵特性。這需要一個接口來指導或訓練機器人做事情,而不需要編程。NLP(自然語言處理)、智能高效的硬件傳感器以及電源和控制方面的進步將被整合到AMR中,以執行一般任務。機器人可以一會兒操作數控機床,一會兒包裝產品。或在農業環境中,AMR可以一會兒除草,一會兒采摘成熟的蔬菜,然后將其包裝好以便裝運。
05在設計過程中,有沒有發生什么有趣的故事?
在打造安森美AMR的過程中發生了很多事情,其中有一次,我們偶然把萬向輪裝錯了,結果導致移動機器人在實際應用中的駕駛行為非常滑稽,而在仿真環境中,車輪的安裝位置是正確的,行為也很正常。還有一次,我們將電機繞組連接線暴露在外,并與鋁材接觸,導致產生了反電動勢(受影響的車輪無法轉動),一名工程師拆下了車輪軸承,但仍不明白車輪為何無法轉動。這個問題后來成為了新工程師加入團隊時學習EMF的一個有趣案例。在安森美,許多不同的工程師都參與了子系統的設計工作。大家都很高興能將這些系統集成到一個自主移動機器人中。
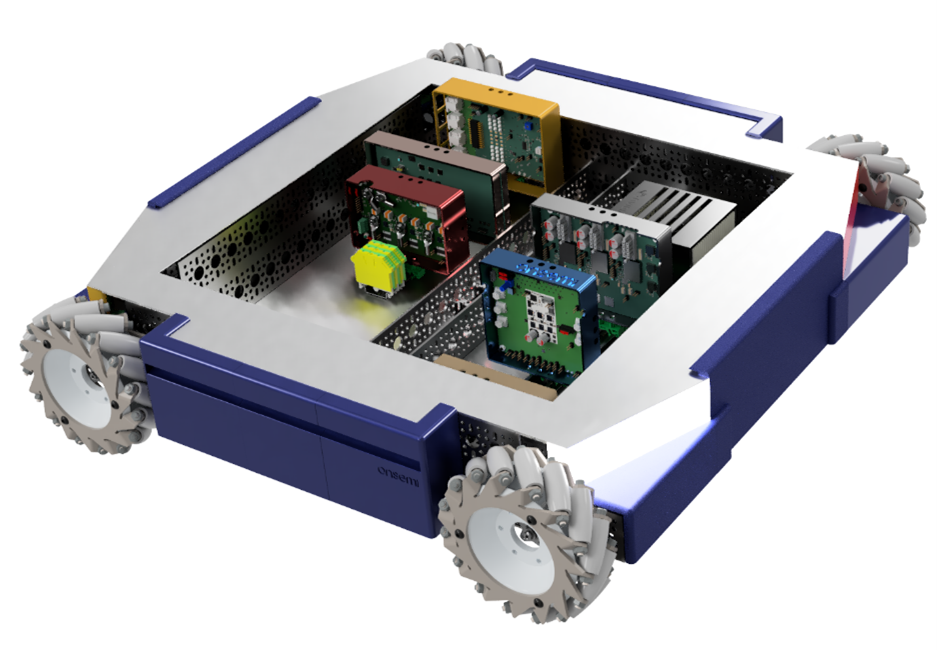
圖2:安森美自主移動機器人
隨著機器人技術在我們的日常生活中變得更加高效和可靠,安森美將繼續開發可以集成到AMR的技術。運動、傳感器、電源、照明和通信子系統是自主移動機器人的構建模塊。
審核編輯:湯梓紅


