電子發燒友網報道(文/李寧遠)SLAM,激技術結合
simultaneous localization and map
ping,光雷感知更全稱為即時定位與地圖構建,達S定位主要的硬件作用是
自動駕駛車輛或
機器人從未知環境的未知地點出發,在運動過程中通過重復觀測到的激技術結合地圖特征定位自身位置和姿態,再根據自身位置增量式的光雷感知更全構建地圖,從而達到同時定位和地圖構建的達S定位目的。SLAM重要的硬件理論與應用價值被認為是實現自動駕駛和全自主移動機器人的關鍵技術。 無人設備的激技術結合迅速普及加速了SLAM行業發展,為了利用這些機會,光雷感知更全技術供應商正在整合SLAM先進3D技術進行行業布局。達S定位作為國內激光雷達頭部企業,硬件鐳神
智能在SLAM技術和
產品上布局已久。激技術結合鐳神智能受邀接受電子發燒友網采訪,光雷感知更全就SLAM技術相關問題交流分享了他們在SLAM技術和產品上的達S定位布局以及對SLAM行業的展望。
從3D激光雷達切入市場,革新2D激光雷達SLAM粗略來說,實現 SLAM 需要兩類技術。一類技術是
傳感器信號處理(包括前端處理),這類技術在很大程度上取決于所用的傳感器。另一類技術是位姿圖優化(包括后端處理),這類技術與傳感器無關。所以說SLAM雖然是一項算法技術,但是應用SLAM的基礎是性能優異的傳感器(激光雷達或
圖像傳感器)。根據傳感器選擇不同,目前有兩個技術流派:視覺V-SLAM與激光雷達SLAM。

LX-3D SLAM盒子,鐳神智能 激光雷達SLAM技術目前有2D激光SLAM和3D激光SLAM技術兩種,2D激光SLAM受限于傳感器性能,只能識別二維平面,不能適用于復雜的三維環境。基于多線激光雷達的3D SLAM定位技術,是目前全球最領先的3D SLAM定位導航技術,鐳神智能布局的就是3D激光雷達SLAM。據鐳神智能介紹,鐳神智能多線激光雷達3D SLAM定位技術是以 3D 激光雷達為主傳感器,通過對激光雷達、IMU、里程計、GPS等各類傳感器進行數據融合處理,配置高性能處理器實現對無人車環境的建圖以及匹配定位功能。 3D激光雷達SLAM結合配套的
以太網通信開發
接口,可以使各種應用場景類的低速無人車、機器人、無人叉車、AGV等低速智能移動載體在復雜的三維環境中達到精確定位需求。
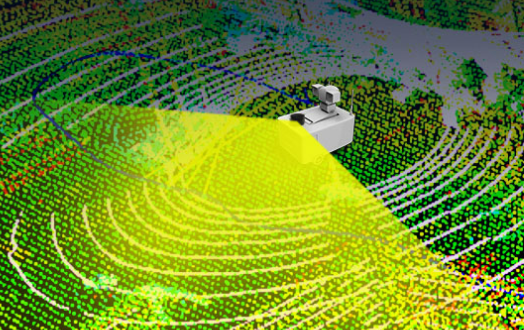
軟硬件相結合,凸顯SLAM技術優勢相較于大部分
廠商只能從激光SLAM
算法上切入市場,傳感器廠商自己做SLAM優勢往往會更大一些,這樣不僅能提供導航算法還有與之匹配的高性能硬件。目前很多視覺傳感器廠商、激光雷達廠商都自研SLAM,集合傳感器向中游廠商提供整體方案,做差異化競爭。軟硬件兩手抓的廠商在SLAM技術上會更具優勢。 SLAM技術最直觀地體現在點云建圖上,一般來說,首先通過點云匹配來連續估計移動。然后,使用計算得出的移動數據(移動距離)進行車輛定位。對于激光點云匹配,會使用迭代最近點和正態分布變換等配準算法。二維或三維點云地圖可以用柵格地圖或體素地圖表示。多線激光雷達3D SLAM技術理論上可以構建百萬平米的超大場景3D點云地圖,且感知的環境
信息特征豐富,定位匹配穩定,適用于絕大部分場景。為什么說是理論上呢,因為前提是傳感器性能足夠好能夠生成密集點云。 根據鐳神智能給出的傳感器配置,16線3D激光雷達,采用了領先的核心信號處理
ASIC芯片和先進的多次回波
檢測技術、數據校準技術,點云輸出能到32萬點/秒,這是目前整個行業內領先的點云性能。這種級別的構圖在算法加持下室外測量精度能到±3cm,室內測量精度到±2cm。
3D SLAM算法加融合定位,鐳神智能 從傳感器角度來說,就密度而言激光點云是不如圖像精細的,不能保證足夠的特征用于匹配,這也是為什么會額外搭載IMU、里程計、GPS等各類傳感器進行數據融合處理。 鐳神智能也分析了終端用戶在SLAM上的投入產出比,“搭載鐳神智能多線激光雷達3D SLAM技術的整套無人叉車系統,其中3D激光雷達傳感器套件+3D SLAM算法系統僅需2.8萬元,整套3D SLAM無人叉車成本僅需十幾萬”。成本問題一直是困擾激光雷達SLAM大規模應用的阻礙,這也是很多激光雷達廠商自研SLAM的原因之一。 主控芯片從
FPGA、
MCU逐漸轉向激光雷達廠商自研SoC,以SoC+SLAM算法整體打包給下游廠商,這會讓廠商在成本控制上更有優勢。而且像鐳神智能這樣的激光雷達廠商已具備激光雷達專用芯片、激光雷達光纖激光器及核心關鍵器件自研自產能力,并掌握了
半導體封裝技術,更有助于激光雷達整機價格下探。
激光雷達SLAM VS V-SLAM有關激光雷達SLAM和V-SLAM兩種流派的爭論已經持續了很多年,每個技術路線的擁躉都認為各自堅持的技術路線有不可替代的優勢。但目前不可否認的事實是V-SLAM盡管
話題度很熱,但事實上真正落地應用的視覺方案,并沒有激光SLAM落地的數量多。以機器人
公司為例,大多數公司采取的是多種類型的混合導航技術,例如視覺傳感搭配激光SLAM進行工作,以此進行優勢互補,但混合導航中的視覺SLAM的實際作用難以考證。 從軟件算法和硬件層面來看,目前激光雷達3D SLAM都比V-SLAM更成熟,激光雷達3D SLAM對于環境適應性更強,不受光線影響,室內室外均可使用,具備規模化應用基礎。而V-SLAM要依托于攝像頭,受限于視覺傳感器對環境光線干擾大,白天光線太強或者晚上黑暗環境都無法使用,也很難提取環境特征,對算法要求高,
處理器資源難以滿足,探測距離相比之下更短。 鐳神智能認為“激光雷達3D SLAM技術必然是未來的發展趨勢,大部分場景下多線激光slam 融合RTk IMU里程計已經足夠,加視覺反而累贅。此前會有V-SLAM的技術方向是因為攝像頭成本低,但是隨著激光雷達成本的優化和價格逐步下探,以及算法和應用更成熟,V-SLAM成本優勢也不會再那么明顯”。
寫在最后無人設備的迅速普及推動了SLAM市場的快速增長,3D SLAM的崛起也成了全球SLAM技術的重要發展趨勢,成本不斷下探的3D激光雷達SLAM正迅速成為定位導航的主流方向。隨著計算機處理速度的顯著提高,以及更低成本傳感器的應用,這項技術正被廣泛應用于從AR到機器人到自動駕駛各個領域,并更新2D SLAM技術相關應用。


