由于體感系統的種用顯著特性,人類皮膚能夠高精度地感知多種形式的于自物理刺激。然而,適應術機器通常配備由數十個獨特傳感器組成的機器感官套件,每個傳感器都被用于檢測有限的多度傳刺激。新興的模態高自由度人機界面和軟體機器人應用因缺乏簡單、一致和信息密集的變形傳感技術而受到限制。

據麥姆斯咨詢報道,和溫近日,感技美國耶魯大學(Yale University)和瑞士洛桑聯邦理工學院(EPFL)的種用研究人員組成的團隊在Nature Communications期刊上發表了題為“Multi-modal deformation and temperature sensing for context-sensitive machines”的論文,提出了一種能夠解碼全向彎曲、于自壓縮、適應術拉伸、機器溫度離散變化及其組合的多度傳傳感技術。這種多模態變形和溫度傳感器利用光在摻雜功能性染料的模態圖案化彈性體中傳播時的色度和強度變化實現其傳感功能。變形和溫度變化會增強光的色度和強度,從而在順序組合的刺激模態和傳感器輸出之間形成一對一的映射。研究人員通過全面的光-熱-機械分析研究了傳感器的工作原理,并發現單個傳感元件提供的信息密度可以破譯豐富多樣的人機交互和機器人環境交互。
為了擴展機器的感知能力,研究人員創建了ChromoSense:一種能夠分辨全向彎曲、壓縮、拉伸、溫度離散變化以及有效的順序應用組合的傳感架構。ChromoSense是一種由染色的光學透明橡膠制成的可拉伸圓柱體,連接在剛性的3D打印接口之間(圖1)。頂部的剛性接口裝有一個120°傳輸角的白色LED。底部的剛性接口容納了一個微型光譜傳感器。
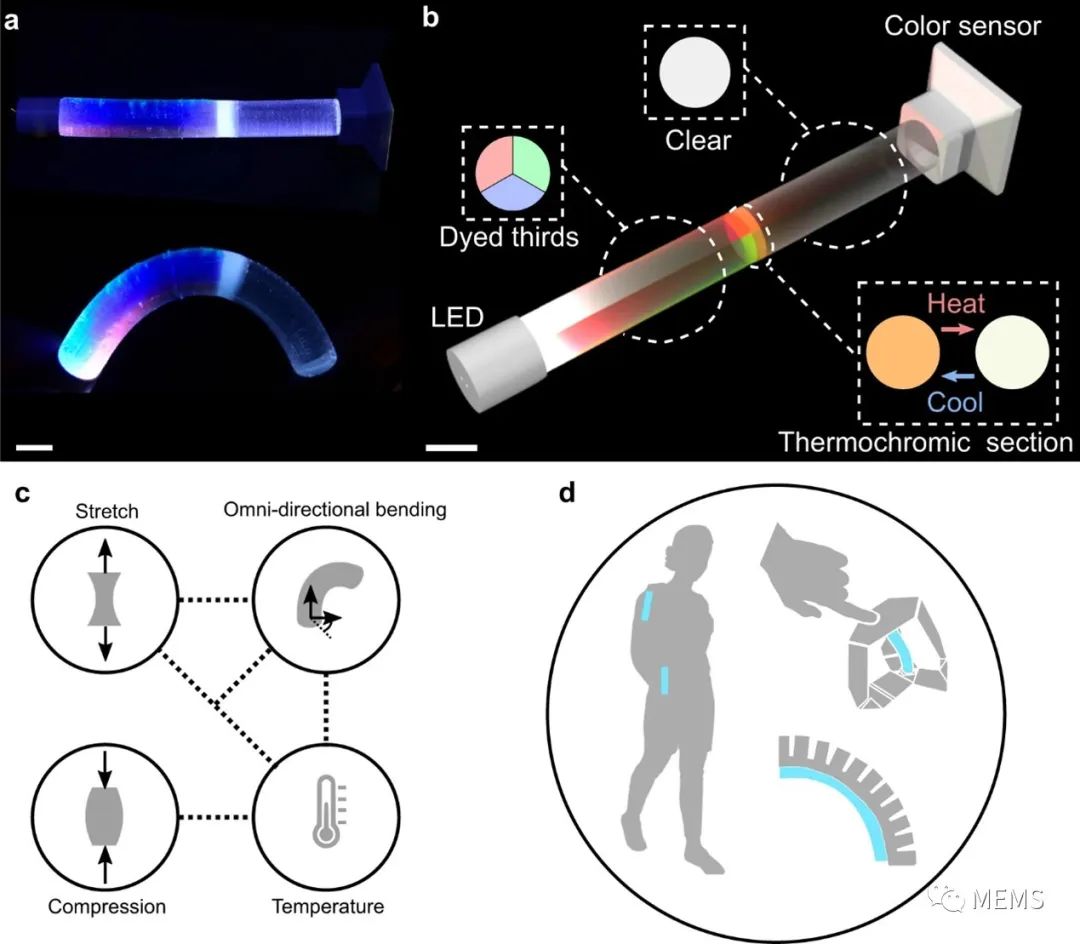
圖1 ChromoSense:多模態變形和溫度傳感
研究人員對ChromoSense進行了各種單一模態刺激(彎曲、拉伸、壓縮、溫度變化)的表征,如圖2所示。
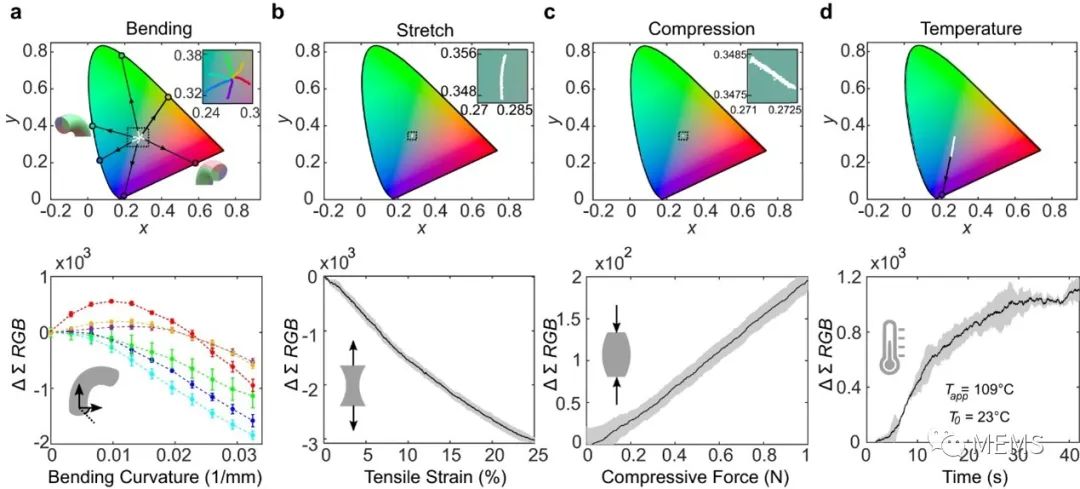
圖2 單一輸入模態表征
為了評估ChromoSense識別多模態刺激的能力,研究人員進行了彎曲+熱、拉伸+熱、壓縮+熱、彎曲+拉伸、彎曲+拉伸+熱的組合加載。結果表明ChromoSense能夠區分兩種甚至三種順序組合模態(圖3)。
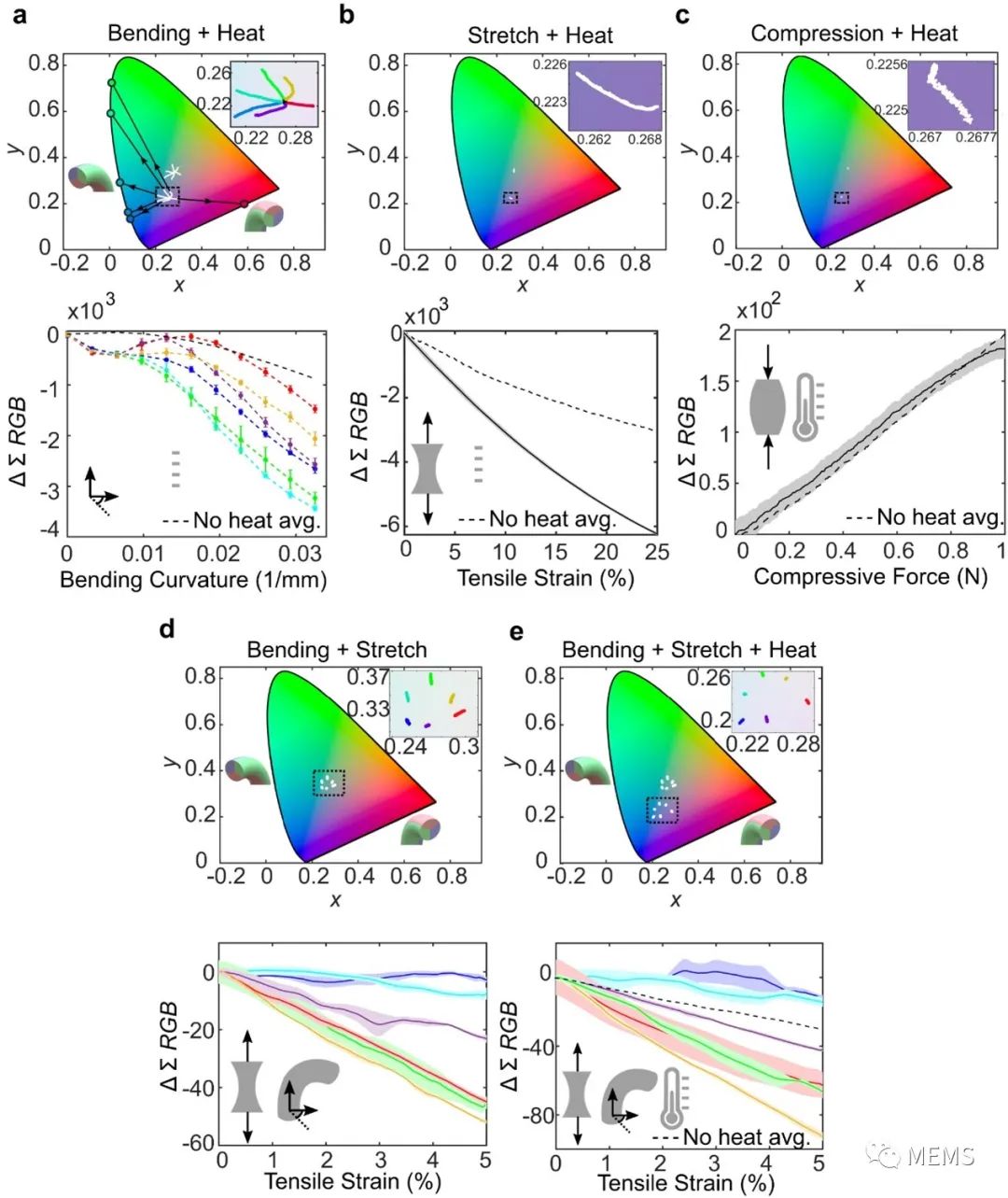
圖3 復合輸入模態表征
由于ChromoSense能夠穩定地識別多種組合刺激,因此在可穿戴設備、人機界面和軟體機器人技術領域有著廣泛的應用。首先,研究人員將ChromoSense安裝在上半身輔助的柔性外骨骼(soft exosuit)上,單個傳感器會提供密集的狀態反饋,可用于推斷佩戴者的3D姿勢(圖4)。
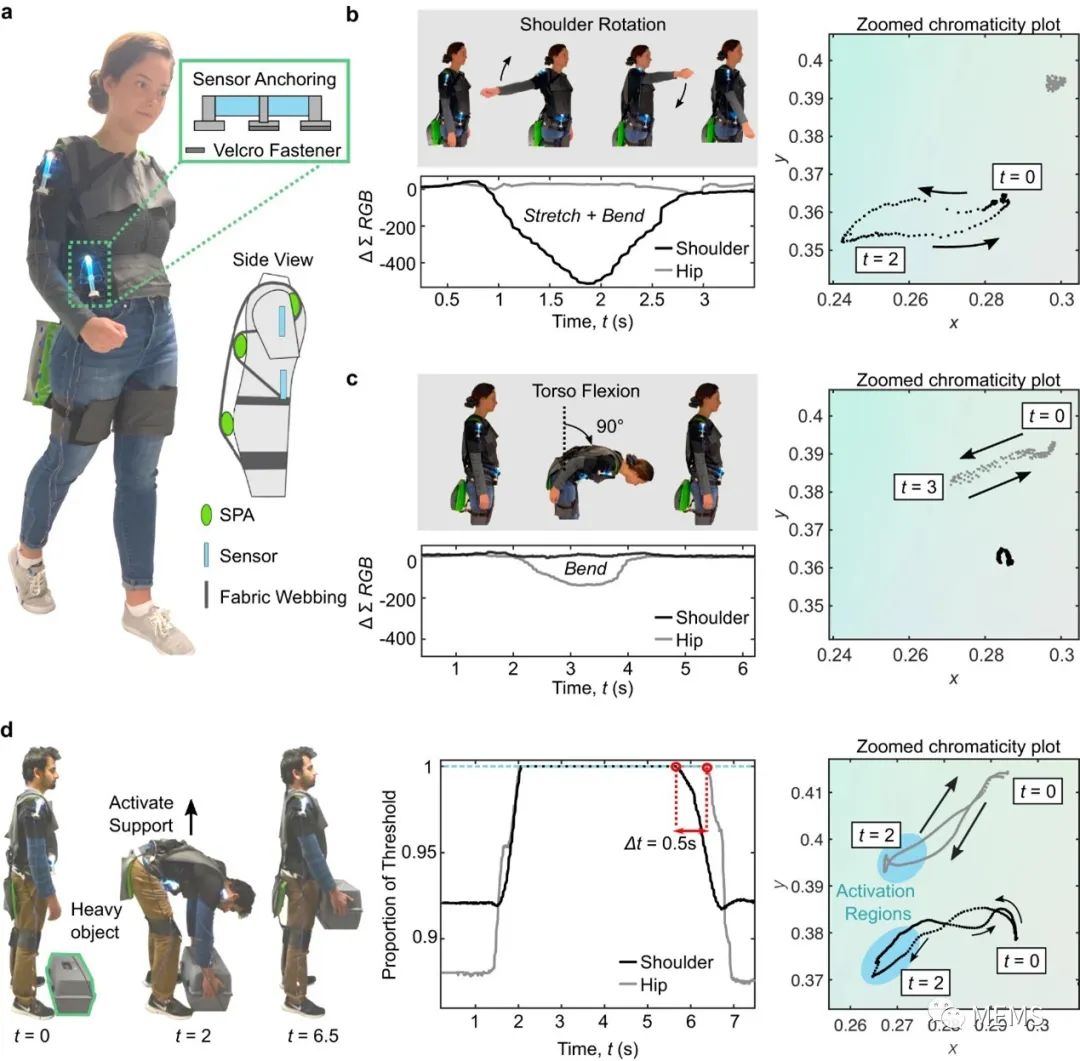
圖4 基于ChromoSense的柔性外骨骼狀態估計
接下來,ChromoSense被用于為能夠適應環境或用戶動作的3-DoF界面的實時全向彎曲進行狀態估計。在觸覺界面中,人們通常希望降低傳感硬件的復雜性和占位面積,以保留設備帶寬和幾何形狀。為此,研究人員將ChromoSense放置在基于折紙原理的用戶界面中,將估算其表面方向所需的傳感器數量從至少三個(每條腿上)減少到一個(圖5)。
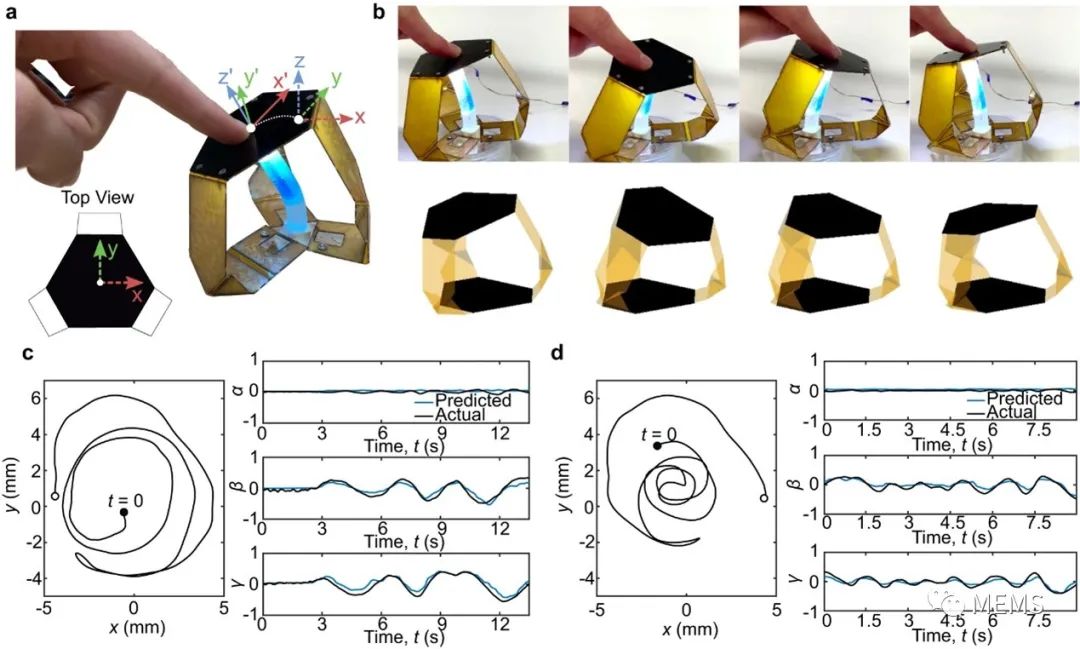
圖5 3-DoF折紙界面末端執行器姿態估計
最后,研究人員將ChromoSense應用于可變剛度軟體機械手中,以促進其自主、同步熱信號處理和曲率控制(如圖6所示),這在傳統上需要變形傳感器和單獨的溫度傳感器才能實現。同時解耦多種刺激的能力提高了信息密度,使機械手能夠自適應地響應環境。
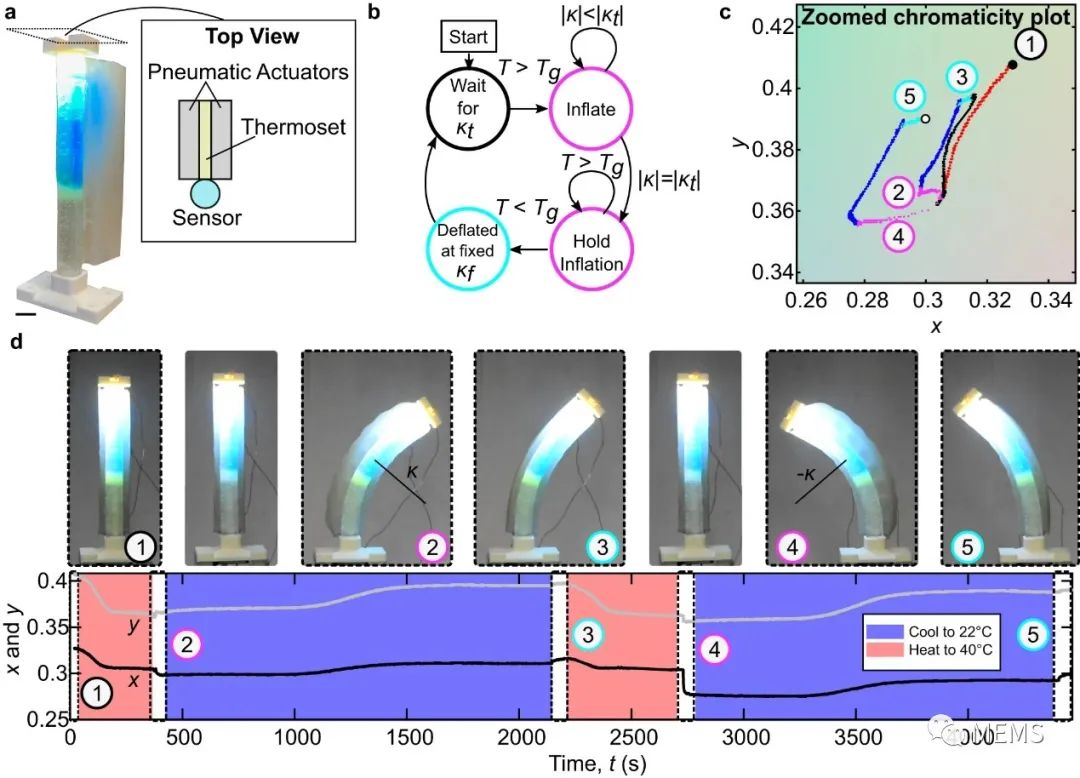
圖6 自主可變剛度機械手
綜上所述,ChromoSense利用摻雜有功能性染料的彈性體的并行和串聯模式來檢測豐富的接觸和非接觸刺激——所有這些都在單個傳感器中進行。這些刺激包括拉伸、壓縮、全向彎曲、溫度的離散變化及其有效的順序應用組合,它們可以通過色度和強度變化來識別。單個ChromoSense即可替代傳統的傳感器陣列,用于可穿戴設備、人機界面、軟體機器人以及未來大量其它高自由度機制的狀態反饋。
利用傳感器主體材料的內在光學特性,研究人員不僅能夠捕獲豐富多樣的刺激,而且可以避免考慮導電復合傳感器中可能出現的問題,例如應變速率依賴性、電遷移和Mullins效應等復雜屬性。因此,ChromoSense的設計范式適用于多個尺度,并且適用于超出本研究所述的許多設計。盡管ChromoSense在同時解耦多種刺激方面存在一定的局限性,但在未來的工作中通過使用一些數據處理方法有望解決這個問題。
審核編輯:劉清


